Blog: Proyecto semana 1
En esta clase la miss se puso a revisar los dibujos de todos los grupos para ver si les podía ayudar o corregir su dibujo para que en la hora en la que esos grupos vayan a iniciar a hacer su proyecto no tengan muchas dificultades en lo que seria la parte electrónica y también reviso los materiales que trajimos para ver en que nos podía ayudar
Conclusiones:
Esta clase nos ayudo a darnos cuenta si nos faltaba algún elemento electrónico para nuestro proyecto.
Dificultades:
Se nos había dificultado saber de que porte iba a ser nuestra base para el proyecto, ya que no queríamos que fuera muy grande ni muy chiquita.
Logros:
Logramos saber todos los materiales electrónicos que usaríamos para el proyecto y las medidas de nuestro base para nuestro pinball
¿Que me pregunto?
Me pregunto si nuestro proyecto cumplirá con todas nuestra expectativas que yo y mi compañero tenemos

Conexión y programación del Servomotor con Arduino
Las conexiones dependerán del tipo de servomotor con Arduino que estemos utilizando.
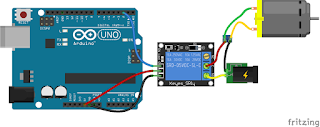
Todos los servos usados para robótica, tiene un conector de 3 cables. VCC (rojo), GND (Marrón) y Señal (Naranja):


Conclusiones:
Esta clase nos ayudo a darnos cuenta si nos faltaba algún elemento electrónico para nuestro proyecto.
Dificultades:
Se nos había dificultado saber de que porte iba a ser nuestra base para el proyecto, ya que no queríamos que fuera muy grande ni muy chiquita.
Logros:
Logramos saber todos los materiales electrónicos que usaríamos para el proyecto y las medidas de nuestro base para nuestro pinball
¿Que me pregunto?
Me pregunto si nuestro proyecto cumplirá con todas nuestra expectativas que yo y mi compañero tenemos

Conexión y programación del Servomotor con Arduino
Las conexiones dependerán del tipo de servomotor con Arduino que estemos utilizando.
Todos los servos usados para robótica, tiene un conector de 3 cables. VCC (rojo), GND (Marrón) y Señal (Naranja):

La señal o dato que hay que enviarle al servo es una señal de PWM donde el tiempo en alto es equivalente al ángulo o posición del servo. Estos valores pueden variar y van desde 0.5 a 1 milisegundo para la posición 0° y 2 a 2.4 milisegundos para la posición de 180°, el periodo de la señal debe ser cercano a 20 milisegundos.

El IDE Arduino trae una librería completa para el control de servomotores, la documentación completa lo encontramos en su página oficial: Servo Library
Expliquemos brevemente las funciones de la librería.
La biblioteca Servo admite hasta 12 motores en la mayoría de las placas Arduino y 48 en el Arduino Mega. En las placas que no sean los de Mega, el uso de la biblioteca desactiva la funcionalidad PWM en las patillas 9 y 10. En el Arduino Mega, hasta 12 servos pueden ser utilizados sin interferir con la funcionalidad PWM, pero si se usan de 12 a 23 motores desactivará el PWM en los pines 11 y 12.
A continuación se muestran las funciones de la librería Servo:
attach(Pin)
Establece el pin indicado en la variable servo. Ej: servo.attach(2);
attach(Pin,min,max)
Establece el pin indicado en la variable servo, considerando min el ancho de pulso para la posición 0° y max el ancho de pulso para 180°.Ej: servo.attach(2,900,2100);
write(angulo)
Envía la señal correspondiente al servo para que se ubique en el ángulo indicado, ángulo es un valor entre 0 y 180°. Ej: servo.write(45);
writeMicroseconds(tiempo)
Envía al servo el ancho de pulso=tiempo en microsegundos. Ej: servo.writeMicroseconds(1500);
read ()
Lee la posición actual del servo, devuelve un valor entre 0 y 180. Ej: angulo=read () ;
attached(Pin)
Verifica si la variable servo está unido al pin indicado, devuelve true o false. Ej: if(attached(2))
detach(pin)
Separa la variable Servo del pin indicado. Ej: servo. detach(2);
BIBLIOGRAFIA:
https://naylampmechatronics.com/blog/33_Tutorial-uso-de-servomotores-con-arduino-.html

Comentarios
Publicar un comentario